
Existem diversos equipamentos e processos automatizados em que o monitoramento e o controle de movimento é essencial para que eles cumpram o papel para o qual foram concebidos; por este motivo, a conversão de grandezas como velocidade e posicionamento em sinais elétricos precisa ser realizada a fim de possibilitar que circuitos eletrônicos sejam capazes de interpretá-los. Diferentes dispositivos possuem esta funcionalidade, são os chamados transdutores, e, no contexto deste artigo, abordaremos a obtenção de grandezas como a velocidade e o posicionamento de partes móveis por meio de sinais elétricos. É fato que os clássicos tacogeradores e as réguas potenciométricas são exemplos de transdutores de velocidade e posição, respectivamente, e com certeza são boas alternativas em determinados tipos de aplicações; no entanto, o nosso foco aqui serão os transdutores digitais de movimento, também conhecidos como encoderes, Figura 1.

O que é um encoder
O encoder é um transdutor que converte o movimento, seja ele linear ou angular, numa sequência de pulsos digitais que podem ser usados para determinar velocidade, posição e sentido de rotação em máquinas ou equipamentos aplicados em diversos processos, tais como: máquinas CNC (Controle Numérico Computadorizado), máquinas operatrizes semi-automáticas, robôs industriais, dosadores e alimentadores. Além disso, podem ser empregados em sistemas de segurança de equipamentos altamente críticos para elevação de cargas através do monitoramento dos movimentos de gruas, guindastes e pontes rolantes.
Superficialmente, podemos imaginar que os encoderes são compostos por um conjunto emissor-receptor de feixe luminoso diretamente focalizados entre si separados por uma espécie de anteparo opaco preenchido por minúsculas janelas transparentes dispostas de forma igualmente intercaladas. Este arranjo resulta numa sequência de pulsos elétricos a medida que ocorre deslocamento do anteparo – acoplado à parte móvel do encoder – fazendo com que o feixe luminoso alcance ou não o receptor gerando pulsos elétricos. A Figura 2 mostra o arranjo de um encoder rotativo.

Tipos de Encoderes
Sob o ponto de vista mecânico existem basicamente dois tipos de encoderes, os tradicionais encoderes angulares e os encoderes lineares – também conhecidos como régua linear. Apesar das diferenças físicas ilustradas na Figura 3, ambos os modelos possuem o mesmo princípio de funcionamento; no entanto, ao considerar as características funcionais, podemos dividi-los também em encoderes absolutos e incrementais.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos


Figura 3 – (a) Encoder angular [3] – (b) Encoder linear [4]
Encoder Absoluto
O encoder absoluto – como o próprio nome diz – é um dispositivo que fornece ao sistema de controle um valor único para cada uma de suas posições em todo o seu curso sem depender de qualquer outro ponto de referência. Esta característica traz um importante diferencial a esse dispositivo uma vez que ele sempre fornecerá sua posição real independente de ter sido submetido a deslocamentos durante eventuais desligamentos da alimentação elétrica.
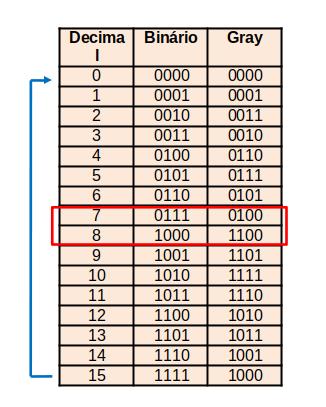
Na prática, podemos ilustrar a seguinte situação, todas as vezes que uma máquina CNC é energizada seu sistema de controle necessita buscar a real posição dos eixos coordenados, se esses eixos forem dotados de encoderes absolutos o posicionamento real é enviado instantaneamente ao sistema sem a necessidade de que cada eixo execute seus respectivos ciclos de busca de referência, o que podemos também chamar de ciclo de “indexação”, ou ainda, zeramento dos eixos. Isso se deve ao fato de que o encoder absoluto fornece ao sistema de controle muito mais do que algumas sequências de pulsos elétricos, mas uma versão adaptada do código binário – chamado de código “Gray”. Este recurso foi implementado devido ao fato de que no código binário convencional há momentos em que um incremento de unidade decimal provoca alterações em mais de um bit no número binário, consequentemente, este tipo de comportamento pode ocasionar erros de leitura de posicionamento caso a aquisição do sinal ocorra no momento da transição dos diversos bits [5].
Observe na Tabela 1 dois dos casos mais críticos em destaque, veja que num deles o decimal 7, que é 0b0111 em binário, ao ser incrementado uma vez passará a ser 8, que em binário é 0b1000, neste caso um simples incremento no sistema decimal provocou a alteração de 4 bits no código binário. O mesmo raciocínio ocorre no segundo caso.
Tabela 1 – Equivalência entre sistemas de numeração [5].
Encoder Incremental
O encoder incremental, apesar de ter construção mais simples, é um dos tipos mais utilizados quando se leva em conta o custo benefício. Suas características fundamentais aliadas ao menor custo faz deste dispositivo um dos principais transdutores de deslocamento aplicados na maioria dos equipamentos e processos que necessitam do monitoramento de movimento. Enquanto os encoderes absolutos normalmente possuem seis canais, os incrementais possuem apenas dois que fornecem ao sistema de controle pulsos de onda quadrada defasados em 90º durante todo o seu curso. Isso significa que com esses sinais elétricos o sistema pode controlar velocidade, sentido de rotação e posicionamento. No entanto, há um pequeno inconveniente neste tipo de transdutor, ao contrário do encoder absoluto, ele perde sua posição real por ocasião do desligamento de sua fonte de alimentação ou eventual falta de energia. Portanto, todas as vezes que se reenergizar um sistema que utilize um encoder incremental como transdutor de posicionamento, deve-se – antes de tudo – executar o ciclo de referenciamento para que a posição real monitorada pelo encoder seja fornecida a partir deste ponto de referência, também conhecido como ponto de origem.
A Figura 4 mostra o principal elemento construtivo que diferencia o encoder incremental do absoluto[6]. Observe que no disco do encoder incremental (a), além dos canais A e B existe também o canal Z que tem a função de sinalizar o ponto onde se encerra uma contagem e se inicia outra. Através deste canal, que fornece apenas um pulso em todo o percurso do encoder, obtêm-se, portanto, a posição de referência para o deslocamento relativo realizado por um encoder incremental. Já no disco do encoder absoluto (b), é possível notar a disposição dos seis canais que são responsáveis pela composição do código “Gray”, conforme mencionado anteriormente, dispensando assim a necessidade de execução de ciclo de referenciamento.


Figura 4 – (a) Encoder Incremental [6] – (b) Encoder absoluto [6]
Conclusão
O emprego dos encoderes no monitoramento de movimento facilita enormemente a implementação de sistemas em que a precisão e a repetibilidade são essenciais para seu bom desempenho. Além disso, esses transdutores também têm sido amplamente utilizados em aplicações de segurança de equipamentos para movimentação de cargas. No entanto, além da escolha do tipo de encoder, sua especificação técnica é crucial e pode determinar o sucesso de um projeto.
Referências
[1] Comander Automação Industrias – https://comanderautomacao.com.br/blog/voce-sabe-o-que-e-um-encoder-incremental/. Acessado em 22/06/2019 [2] Encoder Products Company – https://encoder.com/blog/company-news/what-is-an-encoder/Guia de Acessando em 22/06/2019. [4] https://pt.wikipedia.org/wiki/Encoder_rotativo. Acessado em 18/06/2019. [3] Machine DRO.CO.UK – https://www.machine-dro.co.uk/m-dro-70mm-2-3-4-inch-reading-length-linear-optical-encoder-with-1um-resolution.html Acessado em 23/06/2019. [5] Mecatrônica Atual Edição Nº 3 – Editora Saber Ltda – 2002. [6] Guia de Aplicação de Servo Acionamentos – Industrias WEG S/A – 2007.Imagem de destaque: Encoder incremental Dynapar B58N.jpg – https://commons.wikimedia.org/wiki/File:Encoder_incremental_Dynapar_B58N.jpg Acessado em 03/07/2019















Sou professor de Física, e tento nesse momento onde a Spacex consegue reaproveitar os estágios dos foguetes de lançamento e pousa-lo, dar inicio a curiosidade dos alunos de segundo grau do colegio de Estado do Rio de janeiro, no mundo da programação com ARDUINO. Com esse artigo pude entender como o encoder vai ser útil na construção de braço robótico. Parabéns pela explicação.
Prof. Flávio, bom dia.
Para mim isso é uma honra.
Obrigado!
Parabéns excelente
Parabéns pelo conteúdo didatico e amigo quem não souber sua explicação ,pede pra sair pois vc tem o dom de explicar bem
Mas uma vez parabéns pelo seu trabalho,
Marcelo maia sou tec eletrônica no metrô rio
Marcelo, muito obrigado pelo elogio. Pretendo continuar publicando artigos aqui, mas demanda tempo.
Deus lhe abençoe!!!!
Abç,