
Para que o sistema de controle possa gerenciar a operação do motor, é necessário que a UCM (Unidade de Controle do Motor), também conhecida como ECU (Electronic Control Unit), receba e processe os sinais de sensores indicando a condição de funcionamento do motor. A função de cada sensor e a quantidade existente no veículo varia de acordo com as especificações de cada projeto. Nesse artigo serão detalhados todos os sensores utilizados no gerenciamento eletrônico do motor.
Sensor de rotação do motor
Os dois tipos de sensores mais comuns para se medir a rotação do motor são o sensor Hall e o de relutância variável. Eles determinam a rotação instantânea do motor e a posição da árvore de manivelas. A UCM utiliza a informação da rotação para o cálculo da massa de ar admitida, assim como para efetuar o sincronismo de todo sistema. Para isto, uma roda geradora de impulsos, também conhecida por roda fônica, fixada no eixo da árvore de manivelas, é utilizada para esses sensores. Através da roda geradora de impulsos, o sensor consegue determinar a posição exata da árvore de manivelas. A roda geradora de impulsos é uma peça mecânica parecida com uma engrenagem. É constituída de 60 dentes com a ausência de dois dentes, que é denominada falha. A falha é utilizada como referência para efetuar o sincronismo do motor e a posição da árvore de manivela.

O sensor de rotação tipo Hall está fixado na flange do vedador traseiro do motor, onde também se encontra a roda geradora de impulsos, fixada à arvore de manivelas em posição predefinida. O sensor de rotação tipo indutivo está fixado na lateral do bloco do motor, próximo da embreagem. Neste ponto, também está fixada a roda geradora de impulsos em posição predefinida.
O sensor de relutância variável consiste em um imã de barra com um pino ferromagnético, sustentando uma bobina de indução com dois terminais. A tensão gerada por este sensor é definida pela intensidade do campo magnético que flui por esse circuito, bem como pela velocidade com que o material magnético (roda geradora de impulso) atravessa o sensor. Por outro lado, a intensidade do campo magnético é determinada pela relutância existente no circuito. Quando o dente está totalmente alinhado ao sensor, a tensão é nula, e eleva-se com o afastamento do dente, resultando em uma inversão no sentido da corrente, gerando uma tensão “negativa”, que atingirá o ponto máximo aproximadamente na metade do dente. Portanto, o sinal de tensão de saída de um sensor do tipo indutivo é um sinal senoidal que varia sua amplitude e frequência de acordo com a rotação do motor.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos
Sensor de fase
Assim como o sensor de rotação do motor, o sensor de fase também é baseado no efeito Hall. Este sensor determina a posição do eixo do comando de válvulas de admissão para que a UCM, com a informação do sensor de rotação do motor, possa realizar a injeção de combustível de forma sequencial, isto é, liberar o combustível somente para o cilindro que iniciará a fase de admissão. Isto contribui para a redução das emissões de gases poluentes.

É fundamental que o sincronismo mecânico entre a árvore de manivelas e o eixo do comando de válvulas seja feito com critério e precisão, para que os sinais enviados pelo sensor de fase e de rotação sejam corretamente interpretados pela UCM.
Alguns sistemas de injeção não utilizam o sensor de fase, porém, a fase do motor é estimada indiretamente através do sensor de rotação. A utilização do sensor de fase é uma forma de receber o valor da fase do motor de forma direta e ao mesmo tempo é redundante, trazendo maior segurança para o sistema de gerenciamento do motor.
Sensor de pressão do coletor de admissão
A pressão no coletor de admissão pode ser medida de forma direta pela UCM com o sensor MAP (Manifold Absolute Pressure).
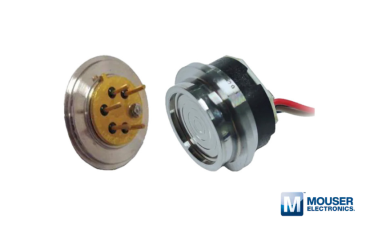
O sensor de pressão absoluta mede indiretamente o fluxo de ar admitido pelos cilindros. A função desse sensor é medir a variação de pressão absoluta no coletor de admissão, baseado num material piezo resistivo fixado a um diafragma de silício. Com o aumento da depressão no coletor de admissão, o diafragma se movimenta, gerando uma deformação nos piezo resistores que, por sua vez, alteram a resistência do seu material, que ao passar por um circuito de condicionamento eletrônico, gera uma alteração na tensão de saída.

Este sensor é fundamental para a determinação da massa de ar admitida. Ele está localizado no coletor de admissão e está submetido às variações de depressão causadas pelas cargas impostas ao motor. É constituído por um elemento semicondutor, integrado a um diafragma de silício. A pressão interna no coletor age sobre o diafragma, causando a sua deformação. Como o elemento semicondutor está integrado a este, acaba se deformando e, conjuntamente, variando seu valor de resistência. Com a ignição ligada e o motor parado, a UCM utiliza o sinal deste sensor para medir a pressão atmosférica local, utilizada como referência nos cálculos de massa de ar admitida e do ângulo de avanço de ignição.
Sensor de fluxo de ar
O fluxo de ar presente no sistema de admissão pode ser medido diretamente pela UCM com o sensor de fluxo de ar, MAF (Manifold Air Flow).

O sensor MAF tem como princípio físico o mesmo de um sensor de fio ou filme quente, que mede a quantidade do fluxo de massa de ar que passa por ele através do aquecimento ou resfriamento de um fio de platina, cuja variação de temperatura é detectada por um termistor, que fica localizado logo após esse fio. Uma corrente elétrica percorre uma área de platina que, por consequência, carrega o valor resultante até um termistor localizado logo após a área de platina. Quanto maior a velocidade do fluido, maior é a taxa de transferência de calor e a mudança da temperatura do sensor.
O sensor MAF estima o fluxo de oxigênio presente no sistema de admissão diretamente. E o sensor MAP fornece a pressão no coletor de admissão e necessita da informação do sensor de temperatura para estimar o mesmo fluxo de oxigênio.
Sensor de temperatura
A medição da temperatura em motores ciclo Otto é geralmente realizada por sensores que variam sua resistência elétrica em função da temperatura. Nos motores ciclo Otto, a UCM normalmente realiza leituras nas temperaturas do líquido de arrefecimento e do ar dentro do coletor de admissão.
O sensor do tipo NTC (Negative Temperature Coefficient) emite um sinal elétrico inversamente proporcional à temperatura medida. Geralmente, sua resistência é construída de óxidos de metais que formam um material semicondutor cuja resistência varia rapidamente em função da temperatura.

O sensor de temperatura do ar de admissão é de fundamental importância para o cálculo da massa de ar. Ele está localizado no coletor de admissão e está submetido às variações de temperatura do ar. Geralmente, é integrado ao corpo do sensor de pressão absoluta descrito anteriormente. A variação de sua resistência em função da temperatura do ar provoca uma queda de tensão no seu circuito de alimentação o que é interpretado pela UCM como a leitura da temperatura do ar de admissão.
O sensor de temperatura do líquido de arrefecimento permite à UCM realizar a estratégia de correção do tempo de injeção e ignição pois, com o motor frio, estes valores devem ser maiores, para acelerar o processo de aquecimento do motor. Esta informação é também importante para que a UCM comande o acionamento do eletroventilador de arrefecimento via relés convencionais.
Sensor de posição angular da válvula borboleta
O sensor de posição angular da válvula borboleta, também denominado TPS (Throttle Position Sensor), é utilizado para indicar o ângulo de abertura da válvula borboleta. Este sensor é constituído de um potenciômetro fixado no eixo da válvula borboleta e altera sua resistência elétrica proporcionalmente à variação angular da borboleta.

Por razões de segurança, empregam-se dois sensores, que são potenciômetros variáveis. Os contatos dos cursores estão situados na engrenagem solidária com o eixo da válvula borboleta. Alterando a posição da válvula borboleta, variam as resistências nas pistas de contato dos potenciômetros e, assim, variam também as tensões dos sinais que são transmitidos à UCM. Os dois sensores usam curvas de respostas opostas. Enquanto um sinal aumenta, o outro sinal diminui a resistência com a variação rotacional da válvula borboleta.
Sensor de posição do pedal do acelerador
O pedal do acelerador possui um sensor de posição e conforme o condutor pisa no pedal do acelerador sua posição é detectada pela UCM, que utiliza esse sinal como referência para determinar o torque do motor. A vantagem em utilizar o pedal como sensor é permitir que UCM defina a posição da válvula borboleta em função da determinação do condutor, mas atendendo também à dinâmica de enchimento do motor e às exigências de controle das emissões, consumo e segurança.
O sensor de posição do pedal do acelerador é constituído por dois potenciômetros. Empregam-se dois sensores para se obter os níveis máximos de confiabilidade dos sinais emitidos, através do sistema de redundância.

Através dos sinais procedentes de ambos os sensores, a UCM detecta a posição momentânea do pedal do acelerador. Alterando a posição do pedal do acelerador, as resistências dos potenciômetros se alteram variando assim a tensão transmitida à UCM.
Sensor de oxigênio dos gases de exaustão
O sensor de oxigênio, também denominado de sonda lambda, é capaz de medir a concentração de oxigênio nos gases de exaustão e, com base nessa informação, é possível estimar o valor real do fator lambda descrito no artigo “Motores de combustão interna ciclo Otto”. O sensor mais utilizado atualmente é o EGO (Exhaust Gas Oxygen), também conhecido como sonda lambda de banda estreita (Narrow Band Lambda Sensor). Outro sensor de oxigênio é o UEGO (Universal Exhaust Gas Oxigen), também chamado de sonda lambda linear ou sensor lambda de banda larga (Wideband Lambda Sensor). Com esse sensor, é possível medir o valor exato do fator lambda, o que possibilita o controle da mistura também fora da região estequiométrica. A figura 7 ilustra os sinais elétricos fornecidos por esses sensores. Eles precisam de uma temperatura de operação acima de 400ºC para que sua saída seja válida. Deste modo, os sensores usados atualmente são pré-aquecidos eletricamente.

O sensor de oxigênio está localizado no sistema de escapamento, geralmente próximo ao motor antes do catalisador. Através da análise adequada da presença de oxigênio na saída dos gases é possível equilibrar a relação da mistura carburante próximo da região estequiométrica. As mudanças de composição dos gases são consideradas pela UCM no controle das diversas funções e servem, geralmente, como aviso para possíveis falhas. Por exemplo, caso algum sensor esteja fazendo uma medição incorreta para a UCM, a UCM também estará realizando os cálculos do tempo de injeção e do avanço de ignição incorretamente. O resultado disso será a formação de uma mistura carburante fora dos parâmetros esperados que será detectada quando a sonda lambda informar a concentração de oxigênio nos gases de exaustão para UCM.
Para atingir a temperatura ideal de operação do sensor em poucos segundos, a sonda lambda possui quatro ligações, sendo duas para enviar o sinal elétrico do sensor até a UCM e as outras duas para controlar o aquecedor elétrico. O sensor de oxigênio opera em função da diferença da concentração de oxigênio entre o gás de exaustão e uma amostra de referência do ar externo, gerando uma diferença de potencial elétrico entre os eletrodos de platina, oscilando entre 200 e 800mV, dependendo do teor de oxigênio presente nos gases de exaustão.

Quando o motor trabalha com a mistura carburante rica, ou seja, lambda menor que 1, a diferença da concentração de oxigênio entre o gás de escape e a amostra de referência do ar externo é maior. Se o óxido de zircônio estiver com a temperatura acima de 400ºC, ocorrerá a passagem de uma grande quantidade de íons de oxigênio entre os eletrodos de platina, causando um aumento na tensão gerada, que estará entre 500mV e 800mV. Quando a UCM recebe esse sinal de tensão do sensor, corrige a mistura carburante, empobrecendo-a, buscando sempre atuar próximo da região estequiométrica.
Quando o motor trabalha com a mistura carburante pobre, ou seja, lambda maior que 1, a diferença da concentração de oxigênio entre o gás de escape e a amostra de referência do ar externo é menor. Se o óxido de zircônio estiver com a temperatura acima de 400ºC, ocorrerá uma redução na passagem de íons de oxigênio entre os eletrodos de platina causando uma redução na tensão gerada, que estará entre 200mV e 500mV.
Sensor de detonação
Para evitar que algum cilindro acabe gerando detonação por fatores externos fora do controle da UCM, este sensor é fixado diretamente ao bloco do motor e trabalha conforme o princípio piezo elétrico. Essa detonação pode ser proveniente de reações espontâneas de oxidação nas regiões quentes de carga não queimada, sendo que a combustão que caracteriza a detonação implica em uma ignição quase instantânea de parte da mistura remanescente, elevadas pressões localizadas, por ondas de choque e oscilações súbitas de pressão. Isto ocorre por conta deste indevido processo acelerado de combustão.
A detonação é extremamente prejudicial ao motor porque produz altíssimas pressões e temperaturas dentro do cilindro, podendo danificar irreversivelmente o pistão, os anéis de pistão, as válvulas, a junta de cabeçote ou a vela de ignição do cilindro em questão. Quando a UCM detecta o sinal de detonação do sensor, esta identifica qual cilindro estava em ignição e imediatamente atrasa o seu ponto de ignição em etapas, até a extinção do problema. Uma vez extinta a detonação no cilindro, a UCM volta a avançar o ponto de ignição, também em etapas, até o valor nominal de seu mapa característico.
No próximo artigo serão apresentados os atuadores presentes no gerenciamento eletrônico do motor.
Referências
ALCÂNTARA DIAS, B. M. Unidade microcontroladora para gerenciamento eletrônico de um motor de combustão interna ciclo Otto. São Paulo. 2015. 269p. (Mestrado) Escola Politécnica, Universidade de São Paulo, São Paulo, 2015.













parabens belo artigo
Cynthia
Parabéns pelo artigo bem detalhado e com conteúdo excelente de fácil entendimento para busca informação relacionada ao assunto.
Sucesso!!
Muito obrigada José Carlos. Fico feliz em saber disso. Muito sucesso pra você também.
Parabéns pelo trabalho, sou professor no SENAI na área Automotiva e Automobilistica, gostaria de estreitar esse contanto afim de compartilharmos conhecimento desde já agradeço. Israel Rabelo
Olá Israel, muito obrigada, fico feliz que tenha gostado. Pode me adicionar no Linkedin, assim manteremos o contato. Ou se preferir, pode anotar meu e-mail também cynthiathamires@hotmail.com
Oieeeee Gostaria muitondas imagens em qualidade e tamanho melhorada. Adorei demais o conteudo… Bem ilustrado. Entretanto se as imagens fossem um pouquinho melhor… Facilitaria a 1000 o aprendizado.
Abracosss obrigado pelo conteudo
Meu email. Esta com vcs .. Fuii
Poxa Diego, muito obrigada pelo seu comentário. Já faz um tempo que fiz o artigo e não vi que agora as imagens estavam assim. Farei o possível pra melhorar as imagens. Muito obrigada.