
Em 1687, Isaac Newton enunciou em sua fantástica obra Philosophiae Naturalis Principia Mathematica que todo corpo tende a permanecer no estado de repouso ou de movimento retilíneo uniforme, a menos que haja sobre ele forças externas que o obrigue a mudar este estado. Essa lei, também conhecida como Princípio da Inércia, é um dos conceitos mais básicos da mecânica clássica. Agora, já imaginou o número de possibilidades que se abririam se existissem sensores capazes de detectar padrões de movimento de sistemas dinâmicos que obedecem a essa lei? Pois bem, esses sensores existem e é sobre isso que veremos nos artigos desta série.
Sensores Inerciais: A relação entre Newton e os sistemas embarcados
A inércia é uma propriedade física da matéria que foi estudada e formulada inicialmente por Galileu e, posteriormente, provada por Newton. Esse princípio, que à primeira vista parece ser óbvio, tornou-se a base para a tão conhecida 1ª Lei de Newton e foi um dos responsáveis por provocar este cientista a desenvolver um ramo da matemática específico para explicação de suas teorias: nada mais, nada menos que o cálculo diferencial e integral. Graças ao sacrifício de Newton, provavelmente a custo de anos e anos de isolamento social, uma base sólida foi desenvolvida para formulação de sistemas dinâmicos clássicos.

Conhecendo-se as leis da dinâmica e sabendo-se como o movimento de corpos são descritos, que espécie de sensores poderia ser utilizada na captação destes movimentos para tratamento e controle em sistemas eletrônicos? Se você leu o último artigo sobre o tema, responderá rapidamente a esta pergunta.
São chamados de sensores inerciais aqueles que têm por objetivo perceber os efeitos da ação de forças que provoquem uma mudança do estado inercial de sistemas sobre os quais estas forças são exercidas, sensores estes baseados na tecnologia MEMS. Devido ao grande número de aplicações, estes sensores se tornaram um dos sistemas microeletromecânicos mais populares. Se você ainda não leu, dá tempo de conferir nosso artigo e saber um pouco mais sobre estes dispositivos que são considerados a maior revolução tecnológica desde a microeletrônica baseada em silício.
Sensores inerciais são dispositivos MEMS capazes de monitorar variações de velocidade e aceleração, linear ou angular, direta ou indiretamente, através da conversão de forças inerciais em alguma mudança física conhecida que possa ser capturada por um transdutor correspondente e convertida em um sinal elétrico. Este sinal elétrico é submetido a processos de filtragem linear e não-linear a fim de se criar uma estimativa do sinal de entrada. A saída final representará um valor calibrado da aceleração ou velocidade medida.

Em um único circuito integrado encontramos estruturas mecânicas microusinadas formando os transdutores mecânicos, responsáveis por realizar a tarefa de sensoriamento, e a microeletrônica, competente o suficiente para nos fornecer sinais elétricos analógicos correspondentes às forças as quais o sensor foi submetido. Se você preferir a tarefa mais facilitada, ainda pode recorrer a dispositivos que forneçam sinais já digitalizados, filtrados digitalmente, processados, e até aos que armazenem leituras anteriores em memória, tudo de forma autônoma, sem a interferência da CPU principal.
Se o sensor fornecerá uma saída bruta, sem qualquer tratamento, ou então uma saída processada, pronta para ser utilizada, dependerá das características do dispositivo escolhido e, claro, do valor investido.

As microestruturas transformam os fenômenos físicos aferidos em um sinal elétrico proporcional. Estes transdutores estão sujeitos a interações com o encapsulamento do circuito integrado, normalmente causando a transferência de calor e tensões mecânicas para o encapsulamento. A recíproca também é verdadeira, de forma que estes fatores do ambiente podem ser transferidos para os transdutores através do encapsulamento, mudando seu comportamento.
A microeletrônica, normalmente, consiste de um estágio de entrada que amplifica o sinal elétrico recebido do transdutor. A eletrônica também deve gerar sinais de controle necessários para configuração e ajuste do funcionamento do sensor. Na prática, a fronteira entre a microeletrônica e os transdutores não é muito bem definida e, frequentemente, estes dois formam um bloco indivisível, onde o estágio de entrada fornece a polarização e excitação necessárias para o transdutor, ou partes da microeletrônica podem atuar como componentes do transdutor.
A categoria de sensores inerciais baseados em MEMS é representada por dois tipos de dispositivos:
-
Acelerômetros: capazes de aferir a aceleração linear na direção de um eixo referencial. Aceleração é a taxa de variação da velocidade no tempo, representada em m/s2 (metro por segundo ao quadrado) no Sistema Internacional;
-
Giroscópios: capazes de medir a velocidade angular em torno de um eixo de referência. A velocidade angular é uma grandeza que representa a taxa de variação da posição angular no tempo, cuja unidade de medida no Sistema Internacional é o rad/s (radiano por segundo).
Acelerações e velocidades angulares são sinais vetoriais, possuindo módulo, direção e sentido. Se somente um componente do vetor é medido, o sensor é caracterizado com 1D ou de um eixo. Se dois ou os três componentes do vetor são capturados, o sensor é caracterizado como um acelerômetro 2D ou 3D, respectivamente. O mesmo vale para os giroscópios.
A complexidade por trás do desenvolvimento de sensores inerciais
Acelerômetros e giroscópios baseados na tecnologia MEMS são dispositivos que devem ser testados e calibrados. O grau de precisão e confiabilidade do sensor a ser utilizado dependerá da aplicação e também das condições do ambiente a ser monitorado, podendo este ser extremamente agressivo para o dispositivo, com variações enormes de temperatura, expostos à umidade ou compostos químicos, além de vibrações e impactos. A vida útil, confiabilidade das medições e resistência quanto a falhas durante a operação, podem variar bastante de um dispositivo para outro e são diretamente proporcionais ao preço do componente. Além disso, ordens de magnitude separam a complexidade de sensores inerciais destinados a diferentes aplicações, apesar do princípio de funcionamento destes sensores ser semelhante.
Na maior parte das vezes, o desempenho do sistema é determinado por ruídos e distúrbios. Estas fontes de ruído podem existir mesmo dentro do próprio dispositivo, sejam elas a eletrônica, os transdutores e até mesmo o atrito das microestruturas com gases internos.

Quando olhamos para os vários estágios de criação de MEMS inerciais podemos verificar que é difícil definir um ponto que desempenha papel central. Dentre os principais estágios podemos citar:
-
O ambiente de trabalho do sensor é normalmente estabelecido pelo chamado encapsulamento de primeiro nível;
-
Os sinais do sensor devem ser aferidos e processados;
-
Em muitos casos, o sensor deve ser excitado por um movimento inicial que deve ser controlado precisamente;
-
Em aplicações de alta performance, o monitoramento em tempo real de certas funções do dispositivo deve ser integrado;
-
Os sinais de saída para comunicação externa e monitoramento, incluindo testes internos, quando necessário, devem ser definidos;
-
O sensor e a unidade de processamento de sinais devem ser encapsulados e ligados aos pinos externos do encapsulamento de segundo nível;
-
O circuito integrado inteiro deve ser calibrado, o que requer equipamentos especiais a fim de criar acelerações ou rotações com alta precisão. As principais funções do dispositivo são testadas, geralmente dentro de toda a faixa de temperatura de trabalho;
-
Finalmente, procedimentos de qualificação devem ser realizados antes que a produção possa ser iniciada.
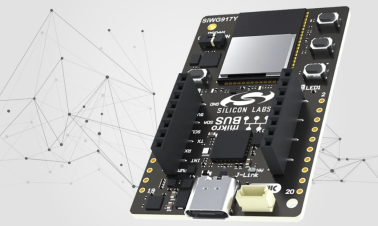
Os encapsulamentos de primeiro e segundo nível podem ser claramente percebidos na imagem de destaque, logo no início deste artigo.
Fiquem atentos pois no segundo artigo desta série conheceremos um pouco mais sobre acelerômetros e giroscópios MEMS, e qual a magia por trás desses microscópicos sensores.
Referências
Isaac Newton. Disponível em: https://en.wikipedia.org/wiki/Isaac_Newton
TORRES, H. L. F. MEMS – Sistemas Microeletromecânicos. Disponível em: https://embarcados.com.br/mems/
STMicroelectronics Makes Leading-Edge MEMS Technology Available for Prototyping through CMP. Disponível em: https://www.st.com/web/en/press/t3408
MEMS & ASIC Product Characterization. Disponível em: https://www.solidustech.com/MEMS_ASIC_ProductCharacterization.html
KEMPE, V. Inertial MEMS, Principles and Practice. Cambridge University Press, 2011.
Imagem de destaque: https://www.bosch-presse.de/presseforum/details.htm?txtID=2136&locale=en












BUSQUEI ESSE ARTIGO POR ESTUDAR AVIAÇÃO E ENTENDER ROTA DE CRICULO MÁXIMO COM FIXOS AEREONAUTICOS EM CONTINENTE E FIXOS OINERCIAIS OU NO GPS 9GLOBAL POSITIONING SYSTEM. QUANDO SE SOBRVOA O MAR.
Excelente artigo!!! Parabéns!
Tem algumas soluções no mercado muito interessantes que integram GNSS (GPS) já com acelerômetro e giroscópio. A operação para o usuário é transparente e o GNSS continua a passar informação sobre a posição do objeto mesmo após perdes o sinal dos satélites GNSS. Exemplo é a família NEO-M8L e NEO-M8U da u-blox
Fiz uma pesquisa sobre acelerômetros, mas mesmo assim não esclareci algumas dúvidas. A definição diz uma coisa (capaz de aferir a aceleração linear na direção de um eixo referencial) mas na prática ele é usado pra outra (mostrando o ângulo em relação ao eixo, como aquela bolha em um líquido verde na régua de pedreiros). Porque isso? Há uma forma de pegar a aceleração ao invés do ângulo?
Ola Guilherme. Na verdade o que o sensor mede é chamado “Força Específica”. Isso compreende tanto a força por inércia (aceleraçao) quanto a força por quaquer outra natureza, como a gravitacional. Dessa forma o que acontece é a leitura da aceleraçao da gravidade, nos 3 eixos do sensor. Através da decomposiçao dos vetores, é possivel determinar o angulo. Veja a imagem no link: Para entender o efeito das duas ao mesmo tempo, coloque o celular em uma mesa e veja o APP do nivel com a bolha centralizada. Sem inclinar o celular, deslize-o para frente/tras ou para os lados. Quanto… Leia mais »