
Sistemas operacionais multi-tarefas sofrem com um grande problema, a concorrência de recursos. Podemos ter várias tarefas usando um mesmo recurso, como um periférico, entretanto, ele só pode fazer uma coisa por vez. E isso gera problemas de concorrência, quando duas ou mais tarefas precisam do mesmo recurso ao mesmo tempo.
O método mais simples para resolver esses problemas é com semáforos, que são como variáveis 0 e 1. Entretanto, há mais recursos que permitem nosso código fluir incrivelmente melhor, como Timeout e Atomicidade.
O que são semáforos?
Semáforos, em programação paralela, são um tipo abstrato de dado que visa a sincronização de tarefas restringindo o acesso de um recurso ou comunicação entre tarefas e ISRs. Os semáforos trabalham de uma forma muito simples e parecida com os semáforos das vias urbanas, onde tentam sincronizar o fluxo de carros.
Os semáforos contam com duas operações básicas, que é quando a tarefa pega (take) o semáforo para uso e depois o libera (give) para outra tarefa ou ela mesmo usá-lo, que estão descritas abaixo e nas figuras 1 e 2.
Take (obter o semáforo): Se o semáforo tiver o valor >=1 que é quando disponível, a tarefa poderá obtê-lo, já que o semáforo está disponível para uso e a função retornará TRUE. Caso o semáforo esteja indisponível, a função retornará FALSE. Ao obter o semáforo, o valor dele é decrementado em 1.
Give (liberar o semáforo): Normalmente após a tarefa obter o semáforo com o “take”, no fim de seu processamento, deve liberar o semáforo para outras tarefas o utilizarem. Ao liberar o semáforo, o valor dele é incrementado em 1.
Atomicidade: Em sistemas multi-tarefas ou multi-cores, temos um problema comum que é quando duas tarefas ou processadores tentam usar o mesmo recurso e isso pode gerar problemas. Um processador pode obter um semáforo exatamente ao mesmo tempo que o outro processador também está obtendo, gerando conflitos. Um item ser atômico nos diz que ele é “indivisível”, ou seja, dois processadores ou tarefas não podem entrar na mesma região do código ao mesmo tempo, conhecido como “regiões críticas”.
Na figura 1, a “Task” está esperando a ISR liberar o semáforo para prosseguir seu processamento e, enquanto isso não ocorre, a “Task” permanece em espera (bloqueada) permitindo que outras tarefas sejam executadas.

Na figura 2, a ”Task2” está esperando o semáforo ser liberado para ela mesmo iniciar seu processamento, enquanto isso, ela permanece “dormindo (bloqueada)”, permitindo que outras tarefas continuem sendo executadas.

Tipos de semáforos
Binário: É o mais simples dos semáforos, como uma única variável valendo “1“ ou “0“. Quando em “1”, permite que tarefas o obtenham e quando “0”, a tarefa não conseguirá obtê-lo.
Mutex: Similar ao binário, entretanto, implementa a herança de prioridade. A herança de prioridade é uma implementação do FreeRTOS que aumenta a prioridade da tarefa que está usando o semáforo quando é interrompida por outra tarefa que também está tentando usar o semáforo. Isso garante que a tarefa que está usando o semáforo tenha a maior prioridade entre todas as outras que tentarem obtê-lo. Este método tenta minimizar o problema de inversão de prioridades.
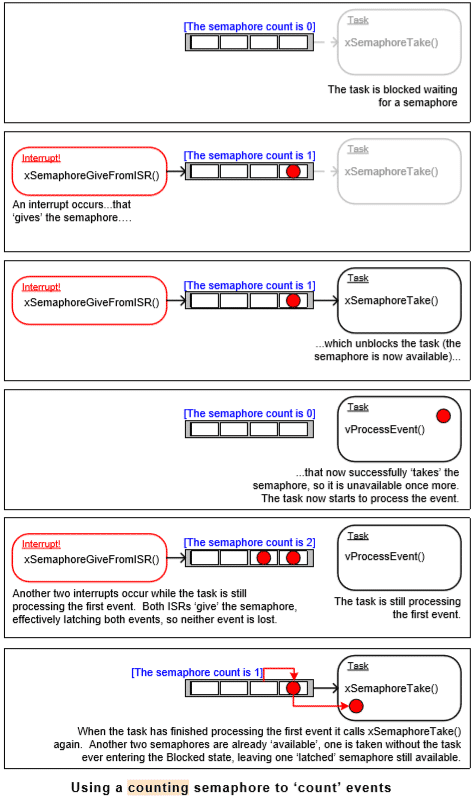
Counting: Similar ao binário mas conta com uma fila de valores, similar a um vetor (array). É muito utilizado para minimizar problemas entre ISR e os outros semáforos, já que se ocorrer mais de uma ISR antes que a tarefa o obtenha, perderemos essa ISR visto que os outros semáforos só têm um ”espaço”. Utilizando o semáforo counting, não perdemos a ISR já que temos vários “espaços” (figura 3), sendo similar a uma Queue que vamos aprender no próximo artigo.
Na figura 4, a “Task1” e “Task2” estão esperando pelo uso do semáforo binário que é liberado pela ISR, porém, só uma conseguirá executar por vez, que será a de maior prioridade. Ou seja, podemos causar conflitos (Starvation) no sistema, já que apenas uma tarefa de várias irá obter o uso do semáforo, uma solução para isso é o semáforo counting ou criar semáforos separados para cada tarefa.
- Nos tempos t2 e t3 as tarefas começam a esperar o semáforo com um Timeout “infinito” (será explicado na prática).
- A ISR (interrupção por hardware) libera o semáforo. Qualquer prioridade de ISR é maior que qualquer prioridade do FreeRTOS.
- Logo que o semáforo é liberado, a tarefa de maior prioridade (Task1) será escolhida pelo scheduler, ocasionando Starvation na Task2.

Vamos finalmente botar a mão na massa e testar o semáforo binário para sincronizar tarefas a partir de uma ISR. Como no artigo anterior, vamos comparar a teoria com a prática. O método que faremos é conhecido como DIH (Deferred Interrupt Handling), onde buscamos remover o processamento da ISR e atribuí-lo a uma tarefa, visto que ISR deve ser o mais rápido possível.
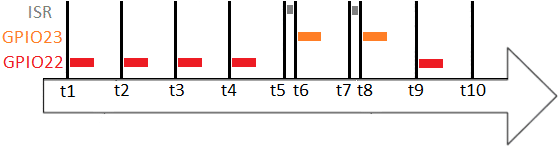
Nosso código terá uma tarefa responsável por analisar o semáforo binário e vamos trabalhar com o Timeout do semáforo, ou seja, se o semáforo não estiver disponível dentro do tempo definido, efetuará uma ação (figura 5).
- Quando a tarefa obter o semáforo dentro do tempo definido, será feito um Toggle no GPIO23.
- Quando a tarefa não obter o semáforo dentro do tempo definido, será feito um Toggle no GPIO22.
- t1, t2, t3, t4, t9 e t10 são marcações quando o Timeout + Delay expirou (300 ms).
Código do projeto:
#include <driver/gpio.h>
#include <freertos/FreeRTOS.h>
#include <freertos/task.h>
#include <freertos/semphr.h>
#include <esp_system.h>
SemaphoreHandle_t SMF;//Objeto do semaforo
void isr(void*z)
{
BaseType_t aux = false;//Variavel de controle para a Troca de Contexto
xSemaphoreGiveFromISR(SMF, &aux);//Libera o semaforo
if (aux)
{
portYIELD_FROM_ISR();//Se houver tarefas esperando pelo semaforo, deve ser forcado a Troca de Contexto (afim de minimizar latencia)
}
}
void t1(void*z)
{
while(1)
{
if (xSemaphoreTake(SMF, pdMS_TO_TICKS(200)) == true)//Tenta obter o semaforo durante 200ms (Timeout). Caso o semaforo nao fique disponivel em 200ms, retornara FALSE
{
//Se obteu o semaforo entre os 200ms de espera, fara o toggle do pino 23
for (uint8_t i = 0; i < 10; i++)
{
gpio_set_level(GPIO_NUM_23, 1);
ets_delay_us(150);
gpio_set_level(GPIO_NUM_23, 0);
ets_delay_us(150);
}
}
else
{
//Se nao obter o semaforo entre os 200ms de espera, fara o toggle do pino 22
for (uint8_t i = 0; i < 10; i++)
{
gpio_set_level(GPIO_NUM_22, 1);
ets_delay_us(150);
gpio_set_level(GPIO_NUM_22, 0);
ets_delay_us(150);
}
}
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void app_main()
{
SMF = xSemaphoreCreateBinary();//Cria o semaforo binario e atribui ao objeto que criamos
//Configura o GPIO22 e GPIO32 como OUTPUT em LOW
gpio_pad_select_gpio(GPIO_NUM_22);
gpio_set_direction(GPIO_NUM_22, GPIO_MODE_OUTPUT);
gpio_set_level(GPIO_NUM_22, 0);
gpio_pad_select_gpio(GPIO_NUM_23);
gpio_set_direction(GPIO_NUM_23, GPIO_MODE_OUTPUT);
gpio_set_level(GPIO_NUM_23, 0);
//Configura o GPIO4 como INPUT e PULL UP
gpio_pad_select_gpio(GPIO_NUM_4);
gpio_set_direction(GPIO_NUM_4, GPIO_MODE_INPUT);
gpio_pad_pullup(GPIO_NUM_4);
//Configura a interrupcao em rampas de decida para o GPIO4
gpio_install_isr_service(ESP_INTR_FLAG_LEVEL1);
gpio_intr_enable(GPIO_NUM_4);
gpio_set_intr_type(GPIO_NUM_4, GPIO_INTR_NEGEDGE);
gpio_isr_handler_add(GPIO_NUM_4, isr, NULL);
xTaskCreatePinnedToCore(t1, "t1", 4096, NULL, 1, NULL, 0);//Cria a tarefa que analisa o semaforo
}
Agora, vamos ver o que o analisador lógico nos diz com a figura 6:

Veja que funcionou como o esperado, o Toggle do GPIO22 está em 300 ms, quando ocorre o Timeout do semáforo mais o delay (canto superior direito) e quando ocorre a ISR, o semáforo é liberado e a tarefa efetua o Toggle do GPIO23.
Além da DIH, os semáforos são muito utilizados para sincronização entre tarefas que tentam obter o mesmo recurso, como um periférico, porém, ele só pode efetuar uma ação (ou menos que a quantidade de tarefas tentando usá-lo) por vez. Vamos entender melhor como isso funciona na figura 7.

Podemos observar que o periférico é utilizado em todo o tempo de análise, entretanto, por tarefas diferentes que são sincronizadas por um semáforo binário:
- No tempo t1, a Task2 obtém o semáforo para utilizar o periférico.
- No tempo t2, a Task1 tenta obter o semáforo, porém, não está disponível e a tarefa entra em espera até que seja liberado.
- No tempo t4, a Task2 libera o semáforo e a Task1 acordará automaticamente para obtê-lo.
- No tempo t5, a Task1 libera o semáforo para outras tarefas utilizarem.
No próximo artigo desta série, vamos aprender sobre Filas de dados (Queues), que funcionam similarmente ao semáforo, entretanto, podemos passar valores! Isso permite, além de algo parecido com o semáforo, comunicação entre tarefas ou ISRs.
Saiba mais
Desenvolvendo um RTOS: Introdução
Implementando elementos de RTOS no Arduino
Criando um projeto no IAR com o FreeRTOS
Referências













O que acontece no caso de tasks em diferentes núcleos no que se refere ao Mutex? A task que toma o semáforo primeiro bloqueia a segunda sem alterar a prioridade de si mesma?
E eu sofrendo com gêmeos do pic