
Caro leitor, neste terceiro artigo da série daremos continuidade ao nosso projeto da Referência de Tensão de Precisão. No primeiro artigo conhecemos um pouco sobre a necessidade e aplicação deste tipo de referência, bem como as características que eram esperadas do projeto. No segundo artigo abordamos o desenvolvimento da fonte de alimentação alojada na própria placa e responsável por alimentar não somente a referência, mas também o circuito de calibração. Neste terceiro artigo apresentaremos o circuito da referência principal e qual abordagem realizada para derivar outros valores a partir dela.
Como em todo projeto, a leitura e verificação do datasheet dos componentes é de extrema importância, não somente para conhecer suas características e limites de operação, mas também porque geralmente os fabricantes disponibilizam diversos circuitos de exemplo que podem ser de base para nossas aplicações. Muitas vezes circuitos que nem imaginávamos ser possíveis com aquele componente.
O datasheet da REF102 apresenta diversos circuitos, desde o mais básico, até circuitos mais completos, permitindo trimar a referência para corrigir pequenos desvios. O circuito implementado é apresentado na figura a seguir.

Um circuito bastante simples que alimenta o principal componente através de uma fonte de alimentação simples. Essa alimentação é proveniente da fonte positiva abordada no artigo anterior. Além disso existe um capacitor de maior valor (1 uF) conectado aos terminais de V+ e COM (GND) responsável por manter a estabilidade da alimentação. Essa referência possui um Power Supply Rejection Ratio (PSRR) bastante elevado de 110 dB. Ao combinarmos com o PSRR do regulador linear utilizado, o LM317, conseguimos tornar o sinal da saída da referência imune a variações e ruídos provenientes da fonte de alimentação.
Grande parte da exatidão e linearidade deste componente tem relação com o componente interno utilizado para gerar a referência de tensão, neste caso um diodo zener compensado. A figura a seguir apresenta um esquemático interno simplificado da referência.

Os Melhores Treinamentos sobre Sistemas embarcados e IoT
Cursos com professores qualificados para acelerar sua carreira e projetos

Tanto o circuito de trimming quanto o capacitor C5 são opcionais, de acordo com o datasheet. Optou-se por introduzir o circuito de trimming visando melhorar a exatidão da tensão fornecida. Nesta topologia o circuito introduz baixo voltage drif e permite compensar a saída do circuito em ±25 mV, mais que suficiente para compensar os poucos milivolts esperados de erro de fábrica. Deixo registrado que essa etapa opcional se tornará efetiva apenas se você possuir um multímetro de precisão para a calibração, caso contrário o circuito deverá ser mantido desconectado ou mesmo seus componentes podem ser omitidos, simplificando o projeto.
O capacitor C5, também opcional, ajuda a minimizar o ruído intrínseco da referência zener. Veja que o resistor R6, quando conectado ao capacitor C5 (pino noise reduction) forma um filtro passa baixa com frequência de corte na próximo a 22 Hz, reduzindo bastante o ruído. Note que para ambos os circuitos foram introduzidos jumpers permitindo os habilitar quando necessário.
Nossa referência principal já está pronta, mas como comentei no primeiro artigo, tinha o objetivo que a referência possuísse múltiplas faixas de saída, tornando sua utilização mais versátil. No próprio datasheet da referência base encontramos um circuito demonstrando como multiplicar ou dividir este valor através de um amplificador diferencial de precisão.
Utilizei esta abordagem dividindo a saída de 10 V por dois (÷2) a cada novo estágio. Para evitar muitos integrados procurei uma versão do amplificador diferencial de precisão que possuísse dois amplificadores em um mesmo encapsulamento. Ao final optei por utilizar o INA2133 que possui excelentes características para este projeto. Com dois integrados conseguimos derivar 4 novas tensões, obtendo assim 10 V, 5 V, 2,5 V, 1,25 V, 0,625 V. O esquemático envolvendo um dos INA2133 é apresentado a seguir.

O circuito pode parecer confuso, mas é relativamente simples. A partir do datasheet encontramos vários arranjos que podem ser obtidos apenas manipulando a conexão entre os pinos externos, neste caso optou-se por um divisor por dois não inversor. O circuito nada mais é do que um divisor resistivo simétrico formado pelos resistores internos conectados à entrada não inversora do amplificador diferencial. Os outros dois resistores são colocados em paralelo e utilizados para realizar a realimentação negativa, ou seja, temos um buffer. Note que o erro máximo será de ±0,05% referente à tolerância dos resistores internos. O arranjo básico é apresentado na figura a seguir.

De uma forma bastante simples, a referência base é aplicada em um desses arranjos (divisor resistivo + buffer), a saída do amplificador é então aplicada no outro amplificador com o mesmo arranjo e este método é repetido 4 vezes, gerando 5 tensões diferentes.
Apesar das características do INA2133 optei por aplicar um circuito que permitisse trimmar o offset de entrada em cada um dos estágio. No pior caso o offset de entrada deve estar no range de ±900 µV (para o grade que eu utilizei), então devemos contar com este fator que poderá diminuir a exatidão de nossas referências. O circuito tem como base uma das aplicações fornecidas no datasheet, mas para procurar o valor ideal decidi utilizar uma simulação e avaliar os resultados.
A simulação foi realizada no software Multisim devido à existência de modelos semelhantes, o que viabilizaria analisar o comportamento mais próximo do real. Utilizou-se como base de teste o modelo INA2132. Mudanças no circuito base foram realizadas conforme os resultados das simulações. A figura a seguir apresenta a simulação com o circuito de trimming.

Note que em série com a entrada não inversora foi inserido um resistor de 10 Ω. Este resistor é inserido para compensar o resistor necessário em seu complemento, permitindo a inserção de uma tensão de offset ao mesmo tempo em que mantemos a proporção do divisor (na verdade alteraremos um pouco devido à tolerância, mas os baixos valores dos resistores tornam esta variação mínima). O circuito de trimming é formado basicamente por um divisor resistivo feito por um trimpot, este em série com outro resistor que por fim é conectado ao resistor de 10 Ω. Veja que neste circuito utilizamos uma alimentação positiva e outra negativa possibilitando corrigir offsets com ambas polaridades.
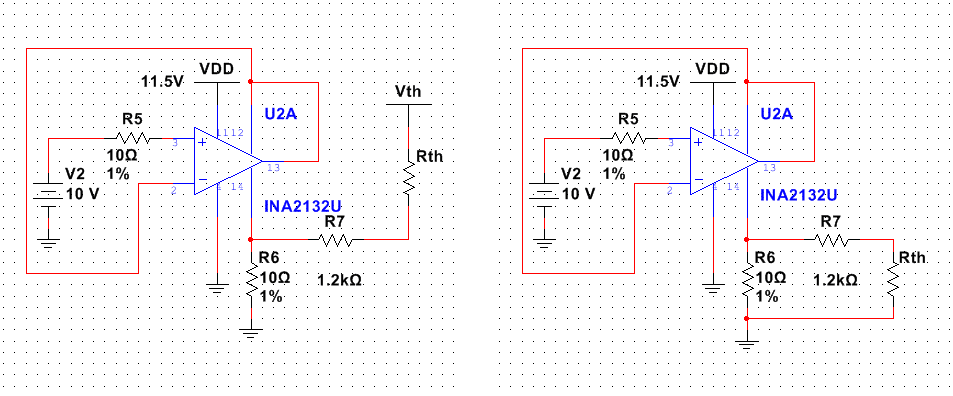
Com base na nomenclatura da simulação (note que é diferente do esquemático anterior) podemos realizar algumas análises. Podemos transformar o trimpot em um equivalente de Thevenin que representará este circuito através de uma fonte de tensão de Thevenin em série com um resistor equivalente. Este circuito equivalente estará em série com o resistor R7. Neste ponto é possível visualizar que temos um novo divisor resistivo formado por esses elementos em série e o resistor de 10 Ω. Ou seja, apenas uma pequena parcela da tensão disponibilizada no trimpot será aplicada na entrada não inversora para correção do offset.
Além disso, veremos que a resistência equivalente deste circuito será o paralelo de R6 com Rthevenin + R7. Como R6 é muito menor que os outros elementos em paralelo, podemos considerar que seu valor será pouco afetado. A mesma análise é aplicada aos outros estágios. Note que existem jumpers permitindo isolar os circuitos de trimming dos INA.
Esta abordagem de utilizar os amplificadores diferenciais de precisão nos permitiram derivar outras tensões e tal processo pode ser repetido mais vezes em busca de tensões menores ou ainda maiores.
Caro leitor, neste ponto já abordamos todos os circuitos que separadamente compõem o projeto, além disso realizamos algumas análises que permitissem um melhor entendimento do projeto e do porque da seleção dos componentes e seus valores.
No próximo artigo revelaremos o esquemático completo, abordaremos o projeto da placa e também os resultados obtidos, demostrando a viabilidade de sua execução e também a exatidão alcançada. Espero que estejam aproveitando esta série. Qualquer dúvida ou sugestão é só aproveitar o espaço para comentários e interagir conosco.
Um abraço e até o próximo artigo.













